|
|
|
Главная страница Развитие телекоммуникационных сетей чтобы различать классы обслуживания [9, 10]. Мы обсудим эти алгоритмы в следующем подразделе. Контроль доступа. Подобно брокеру полосы частот в архитектуре DiffServ, в DWDM сетях существует оптический распределитель ресурсов, предназначенный для динамического предоставления световых путей [11]. Оптический распределитель ресурсов отслеживает состояние ресурсов, таких как количество несущих, звеньев, кросс-коннекторов, усилителей и т.п., доступных каждому световому пути, и оценивает характеристики светового пути (вычисление ВЕН) и функциональные возможности (защита, контроль и надежность). Оптический распределитель ресурсов также ответственен за первоначальное установление вызова из конца в конец по цепи оптических распределителей ресурсов, представляющих другие оптические домены, пересекаемые световым путем. Все вышеназванные компоненты воплощены в оконечных устройствах сети и/или оптическом распределителе ресурсов. На рис. 6.13 изображена WR сеть с оконечными устройствами, оптическим распределителем ресурсов и внутренними устройствами ОХС. Внутренние ОХС нужны только для конфигурации коммутирующего ядра сети при установлении светового пути. Рассмотрим далее алгоритмы распределения световых путей. В основном, алгоритмы распределения световых путей (Lightpath Allocation, LA) разделяют доступные световые пути на различные подмножества. Каждое подмножество ассоциировано с классом обсл Оптический распределитель ресурсов 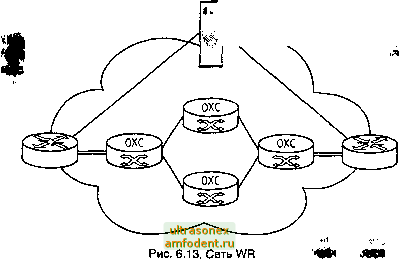 Оконечный узел  Оконечный узел вания. Методы LA различаются по способу назначения подмножеств световых путей классам обслуживания. Это распределение может быть статическим, статическим с заимствованием или динамическим. При статическом распределении каждому классу обслуживания сопоставляется фиксированное подмножество световых путей. Количество световых путей в каждом подмножестве зависит от класса обслуживания (т.е. с более высоким классом обслуживания ассоциируется большее число световых путей). Когда используется заимствование, классы различного приоритета могут заимствовать световые пути друг у друга согласно какому-то критерию. Различные методы такого заимствования описаны в [9]. Например, низкоприоритетный трафик заимствует пути у более высокоприоритетного. Однако обратное заимствование невозможно, так как световые пути низкоприоритетного трафика могут не удовлетворять требованиям QoS более высокоприоритетного класса. При динамическом подходе сеть запускается без резервирования световых путей для классов обслуживания. Все множество доступных световых путей может быть динамически назначено любому из существующих в сети классов обслуживания, при условии, что все световые пути имеют одинаковые характеристики. Один из методов динамического распределения световых путей - использование пропорционального разделения [10]. При пропорциональном разделении возможна количественная настройка разделения служб по индивидуальным QoS меркам, пропорционально факторам разделения, заранее установленным оператором сети. Другими словами, если q, - мера QoS важности из, - факторы разделения для класса /, то при использовании пропорциональной модели для всех пар классов обслуживания должно выполняться следующее соответствие: 5l Чу где/, у =1,2.....Л/. Например, предположим, что qi и Чг - вероятности потери пакетов для классов 1 и 2 соответственно. Если s, равно 1, а Зг равно 3, то вероятность потери пакета для класса 2 в три раза больше, чем для класса 1. Следовательно, количество световых путей, выделенных классу 1, должно быть в три раза больше, чем для класса 2. QoS в сетях с оптической коммутацией пакетов. Идея, лежащая в основе большинства методов OPS - разделение путей следования данных и управляющей информации. В этом случае, функции маршрутизации и перенаправления выполняются с использованием электронных микросхем после О/Е преобразования заголовка пакета, в то время как полезная нагрузка прозрачно коммутируется в оптическом домене без каких-либо преобразований. До сих пор было предложено всего несколько методов обеспечения разделения служб в OPS сетях. Это связано с тем, что OPS - относительно новая технология, и еще много проблем ожидает своего решения. При любом методе коммутации пакетов могут возникать конфликты, когда большое количество пакетов должно быть передано через малое число исходящих звеньев за ограниченное время. В основном, технологии QoS в сетях OPS с целью обеспечения разделения служб при возникновении конфликтов используют алгоритмы волнового разделения и FDL. В [11] представлено два алгоритма для разделения служб в оптических пакетных коммутаторах. Дадим краткий обзор этих алгоритмов как основных технологий обеспечения QoS в сетях OPS. Распределение несущих (Wavelength Allocation, WA). При этом методе все доступные несущие разделяются на отдельные подмножества и каждое подмножество ассоциируется с различным уровнем приоритета, так что более высокий уровень приоритета имеет большую часть от доступных несущих. Возможны различные алгоритмы WA, подобные представленным ранее алгоритмам 1-А. Методы WA для разделения служб используют только длину волны и не Применяют FDL буферы. Комбинированное распределение несущих с пороговым сбрасы-j ванием (Combined Wavelength Allocation and Threshold Dropping, WATD). В дополнение к WA, в этом методе используется порог отбра- сывания для установления различий между разными классами при-; оритета. Когда заполнение FDL буфера превышает установленный порог, низкоприоритетные пакеты отбрасываются. Путем использова-; ния различных порогов отбрасывания для каждого уровня приоритета; можно обеспечить разделение классов обслуживания. Этот метод для обеспечения разделения служб использует как волновую область (WA), так и временную (FDL), поэтому он более сложен в расчетах, чем безбуферный метод WA. Хотя представленные подходы и выглядят простыми, их воплоще-! ние в OPS может вызвать трудности, так как это потребует синхрони-! зации между заголовком пакета и его полезной нагрузкой. Этот npo-l цесс требует, чтобы полезная нагрузка пакета была задержана до тех пор, пока заголовок не будет полностью обработан и пакет не будет] классифицирован, после чего пакету назначается несущая. Но при! этом используется принцип пакет за пакетом , который ограничива-] ет скорость коммутации. Более того, так как к пакетам в FDL невоз- можно произвести произвольный доступ, как в случае электронных! буферов, требуется разработка новых методов для доступа к любому произвольному пакету, хранимому в FDL. QoS в сетях с оптической коммутацией блоков. Обеспечение QoS в сетях OBS требует сигнального (для резервирования) протоко- ла, поддерживающего QoS. К тому же, для магистральных коммутаторов блоков необходим алгоритм планирования блоков. Сигнальные протоколы с поддержкой QoS. Сигнальный протокол для поддержки QoS в OBS был предложен в работе [9]. Этот протокол основывается на протоколе JET и называется приоритезирован-ным JET (pJET). В pJET используется время смещения как способ обеспечения различных классов обслуживания в безбуферных оптических сетях. Предположим, мы имеем два класса обслуживания: высокоприоритетный класс 1, и класс О - класс с обслуживанием по возможности. Для того чтобы класс 1 имел больший приоритет при резервировании полосы пропускания, этому кпассу дается дополнительное время смещения tonset- Значение fofise. - константа и значительно превышает время смещения (Го) в исходном протоколе JET. К тому же, оно должно быть больше, чем максимальная длина всех блоков класса 0. С таким большим временем смещения вероятность потери блока для класса 1 становится независимой от нагрузки, поступающей от класса О, а только является функцией от поступающей нагрузки класса 1. С другой стороны, поступающая нагрузка обоих классов будет определять вероятность потери блока для класса 0. На рис. 6.14 показано, почему запрос класса 1, связанный со временем смещения foiiset. получает больший приоритет при резервировании полосы, чем запрос кпасса 0. Обозначим, ta, и tg, -время прибытия и время начала обслуживания для запроса req(/) класса /, где, для нашего примера, / = О, 1; и /, - длина поступившего блока кпасса /. Рассмотрим следующие две ситуации, когда возможны конфликты между двумя классами. В первом случае, изображенном на рис. 6.14, req(1) поступает первым и резервирует полосу частот, а запрос req(O) поступает после этого. Очевидно, что req(1) будет выполнен успешно, а запрос req(O) будет блокирован, если: taO < fsl и faO + /о < f  Время
I. tao(-tjo) РЮ. .14. Временное смещение для гарантированного обслуживания ИЛИ если tao<ts+l Во втором случае, req(O) поступает перед req(1), как показано на рис. 6.14. Легко заметить, что до тех пор, пока для класса 1 длина блока больше, чем максимальная длина блока класса О, любой запрос от класса 1 будет отменен блокирующим запросом от класса 0. Авторы в [9] представили простую аналитическую модель, вычисляющую вероятность потери блока, как функцию <otfset и сделали вывод, что для обеспечения близкой к 100 % независимости классов О и 1 необходимо, чтобы offset было равно 5Lo- где Ц - средняя длина блока класса 0. Основной недостаток этого алгоритма состоит в том, что он вносит значительную задержку в передачу вьюокоприоритетного трафика. . Планирование в OBS. Когда управляющий блок прибывает в узел, используется алгоритм планирования волновых каналов для опреде-1 ления волнового канала (и FDL, если они применяются) на исходя- щем звене для соответствующего блока данных. Планирорщику необходима такая информация, как время прибытия блока и его смещение по отношению к управляющему блоку. Планировщик отслеживает доступные временные слоты в каждом волновом канале. Если на узле используются FDL, планировщик выбирает один или более FDL для задержки блока данных, если это необходимо. Волновой канал называется неназначенным (unscheduled) в момент времени t, если нет блоков, использующих этот волновой канал в момент времени t или после него. Канал называется неиспользуемым (unused) в промежутке времени между двумя следующими друг за другом блоками или после последнего блока, связанного с каналом. При реализации планировщика OBS встает несколько проблем. Во-первых, он должен выбирать волновые каналы и FDL эффективным способом, снижающим вероятность потери блока. К тому же, он должен быть способен достаточно просто управлять большим количеством блоков в очень высокоскоростном окружении. Более того, планировщик не должен становиться причиной ситуации раннего прибытия блока данных , когда блок данных прибывает до того, ка1 управляющий блок будет обработан. В литературе было предложено большое количество алгоритме назначения волновых каналов [12-16]. Ниже представлены некоторые из них. Алгоритм первого подходящего неназначенного канала (First Fit Unscheduled Channel, FFUC). Для каждого исходящего волнового канала алгоритм FFUC отслеживает время, когда он находится в нена-значенном состоянии. Всякий раз, когда прибывает управляющий блок, FFUC алгоритм просматривает все волновые каналы в фиксированном порядке и назначает блоку первый попавшийся канал, ю Чо>
Время  Рис. 6.15. Алгоритм LAUC торый перейдет в неназначенное состояние до прибытия блока данных. Основное достоинство этого алгоритма - простота вычислений. Основной его недостаток в том, что в результате получается вьюокая вероятность отбрасывания блока, так как алгоритм не принимает во внимание промежутки между запланированными блоками. Алгоритм позднейшего доступного незапланированного канала (Latest Available Unscheduled Channel, LAUC). Основная задача алгоритма LAUC состоит в том, чтобы повысить использование канала путем минимизации промежутков между блоками. Это осуществляется путем выбора самого позднего неназначенного волнового канала для каждого прибывающего блока данных. Например, на рис. 6.15 в момент времени tg несущие 1 и 2 неназначены, и в fa для передачи прибывшего блока данных будет выбрана несущая 1, так как промежуток между блоками на несущей 1 будет меньше, чем, если бы была выбрана несущая 2. LAUC обеспечивает меньшую вероятность отбрасывания блока, чем при алгоритме FFUC, и не требует каких-либо дополнительных вычислительных ресурсов. Однако он, так же как и FFUC, не принимает во внимание наличие промежутков между блоками, что приводит к относительно высокой вероятности отбрасывания блока. Алгоритм LAUC с заполнением промежутков (LAUC with Void illing, LAUC-VF). Ha рис. 6.15 в промежутке между двумя блоками на несущей 1 канал не используется. LAUC-VF похож на LAUC, за исключением того, что промежутки заполняются вновь прибывающими блоками. Основная идея этого алгоритма состоит в минимизации промежутков между блоками путем выбора позднейшего неиспользуемого канала для каждого прибывающего блока данных. В заданное время прибытия ta на оптический коммутатор блока данных длительностью L, планировщик сначала находит все исходящие
|
|||||||||||||||||||||||||||||
|
© 2000 - 2025 ULTRASONEX-AMFODENT.RU.
Копирование материалов разрешено исключительно при условии цититирования. |